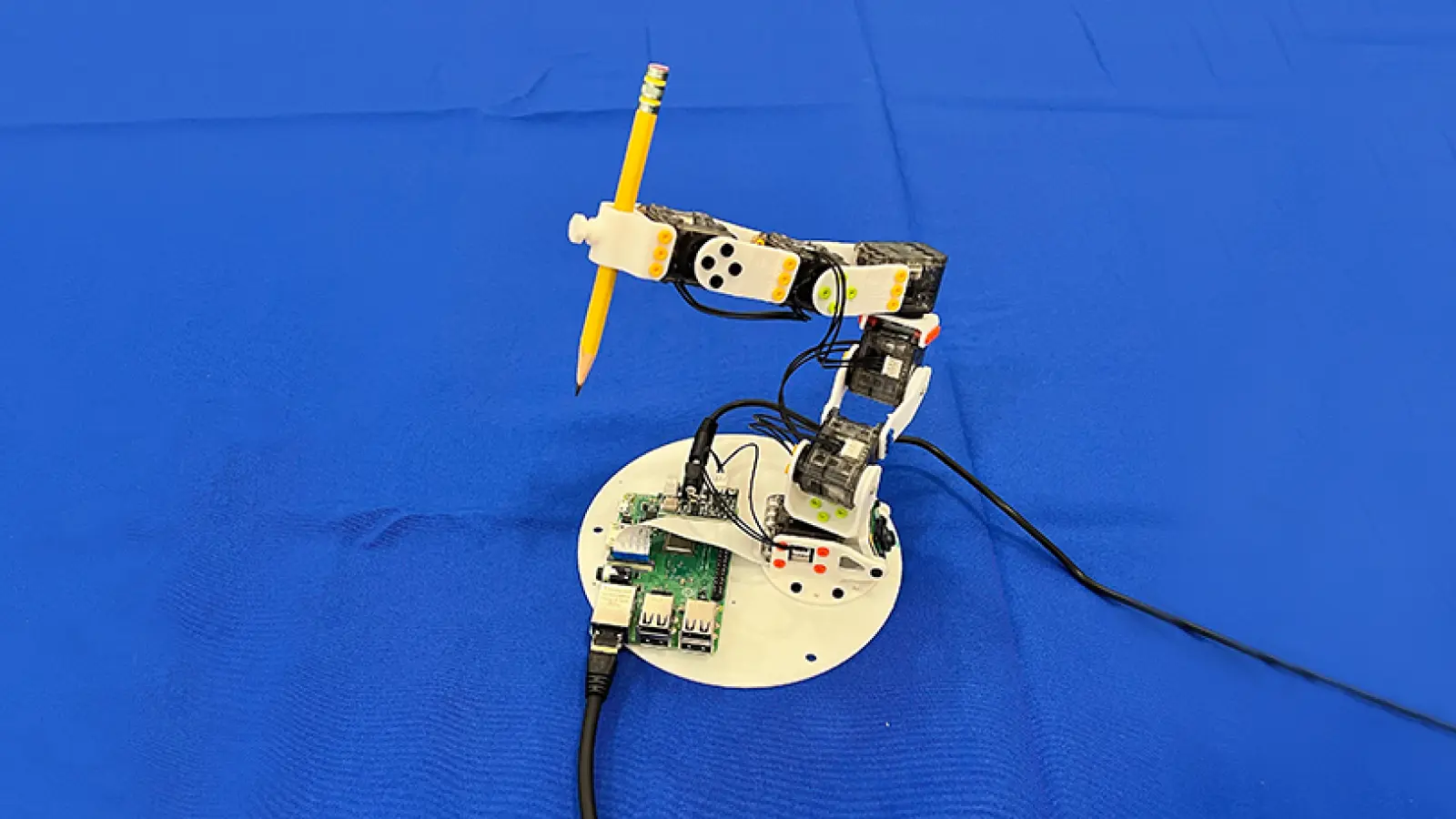
Teknoloji dünyasında çığır açacak bir gelişme yaşandı! Amerika Birleşik Devletleri'ndeki ünlü Massachusetts Teknoloji Enstitüsü (MIT) bünyesindeki araştırmacılar, robotları dışarıdan hiçbir sensör veya ön eğitim olmadan sadece kameralar aracılığıyla kontrol etmeyi öğretebilen yenilikçi bir yapay zeka sistemi geliştirdi. Bu sistem, robotların çevreyi adeta kendi gözleriyle görerek hareket etmeyi öğrenmesini sağlıyor.
Bu çığır açıcı teknoloji, robot mimarisi hakkında verileri kameralar aracılığıyla topluyor. Tıpkı insanların hareket ederken kendi bedenlerini gözleriyle tanımaları gibi, bu yapay zeka sistemi de robotların fiziksel olarak kendilerini fark etmelerini sağlayan, insansı bir yetenek kazandırıyor.
Araştırmacılar, bu başarıya ulaşmak için yeni bir kontrol yaklaşımı ortaya koydu. Bu yaklaşımda, robotların görsel algılarını (visuomotor Jacobian alanı) kullanan kameralar, makinenin görülebilen 3 boyutlu noktalarını robotun hareket ettirici mekanizmalarına eşleştiriyor. Bu sayede yapay zeka modeli, hassas hareketleri tahmin edebiliyor. Bu da, yalnızca birkaç saatlik bir eğitimle, yumuşak robotlar ve esnek malzemelerden üretilmiş robotlar gibi geleneksel olmayan robotların bile otonom birimler haline gelmesini mümkün kılıyor.
Projenin baş araştırmacılarından birinin belirttiği üzere, bu sistem tıpkı insanların parmaklarını nasıl kontrol edeceğini öğrenmesi gibi çalışıyor: sallayarak, gözlemleyerek ve adapte olarak. Sistem, rastgele deneme yanılma yoluyla hangi kontrollerin robotun hangi kısımlarını hareket ettirdiğini keşfediyor.
Geleneksel robotik çözümleri, hassas mühendislik gerektiriyor ve önceden eğitilmiş sistemlerle kontrol edilebilen makineler için özel üretim standartları belirleyebiliyor. Bu yöntemler, pahalı sensörler ve her olası hareket senaryosunu öngörmek için yüzlerce, hatta binlerce saatlik ince ayar gerektiren yapay zeka modelleri isteyebiliyor. Örneğin, el benzeri eklemlerle nesneleri kavramak, hem makine mühendisliği hem de yapay zeka kontrol sistemleri alanlarında zorlu bir görev olarak karşımıza çıkıyor.
Çevreyi Anlama Yeteneği Gelişiyor
Buna karşılık, "Jacobian alanı" haritalama tekniğini kullanan bu kamera tabanlı çözüm, robot sistemlerini otomatikleştürme zorluğuna düşük maliyetli ve yüksek doğruluklu bir cevap sunuyor.
Araştırmacılar bulgularını, insan beyninin makineleri kontrol etme yöntemini taklit etmek üzere tasarlandığını belirttikleri makalelerinde yayınladı. Makaleye göre, sadece gözlerimizi kullanarak 3 boyutlu yapıları öğrenme ve yeniden oluşturma yeteneğimiz ile hareketleri kontrolün bir fonksiyonu olarak tahmin edebilmemiz mümkün.
Sistemin çerçevesi, robotların rastgele komutları uyguladığı anları kaydeden 12 adet tüketici sınıfı RGB-D video kamerasından alınan iki ila üç saatlik çoklu açı videoları kullanılarak geliştirildi. Bu çerçeve iki temel bileşenden oluşuyor: Birincisi, robotun 3 boyutlu uzayda nerede olduğunu ve uzuvlarının nerede bulunduğunu belirlemesini sağlayan bir derin öğrenme modeli. Bu, belirli hareket komutları uygulandığında pozisyonunun nasıl değişeceğini tahmin etmesine olanak tanıyor. İkincisi ise, genel hareket komutlarını robotun anlayabileceği ve uygulayabileceği koda çeviren bir makine öğrenmesi programıdır.
Ekip, yeni eğitim ve kontrol yaklaşımının etkinliğini geleneksel kamera tabanlı kontrol yöntemleriyle karşılaştırarak test etti. Jacobian alanı çözümü, özellikle görsel engellemelerle karşılaşıldığında eski yöntemlerin hata durumuna girdiği durumlarda, mevcut 2 boyutlu kontrol sistemlerinden daha yüksek doğruluk gösterdi. Ancak ekibin yöntemini kullanan makineler, sahneler rastgele karmaşa ile kısmen kapalı olsa bile başarılı bir şekilde gezilebilir 3 boyutlu haritalar oluşturdu.
Bilim insanları çerçeveyi geliştirdikten sonra, bunu farklı mimarilere sahip çeşitli robotlara uyguladı. Sonuç olarak, yalnızca tek bir video kamerayla robotları eğitmek ve çalıştırmak için ek insan müdahalesi gerektirmeyen bir kontrol programı ortaya çıktı.