Bilim insanları, ışık desenleri ve Albert Einstein'ın görelilik teorisi prensiplerini kullanarak mikroskobik yüzücü robotları yönlendirme konusunda çığır açan bir yöntem geliştirdi. Bu teknoloji, tıp ve üretim gibi çeşitli alanlarda minik robotların kullanımının önünü açabilecek ilk adım olarak görülüyor.
Pratik uygulamalar için mikrorobotlar geliştirmenin en büyük zorluklarından biri, bu minik makineleri işlevsel hale getirecek karmaşık ve hacimli sensörler ile elektronik bileşenler eklemeden yönlendirebilmektir. Zira bu eklemeler, makinelerin istenen ölçekte, örneğin insan vücudu içinde çalışmasını imkansız hale getirebilir. Bu sorunun üstesinden gelmek için araştırmacılar, uzay araçlarının veya ışığın evreni geçerken izlediği yollara benzer şekilde makineleri yönlendirecek 'yapay uzay-zaman' kavramını ortaya koydu.
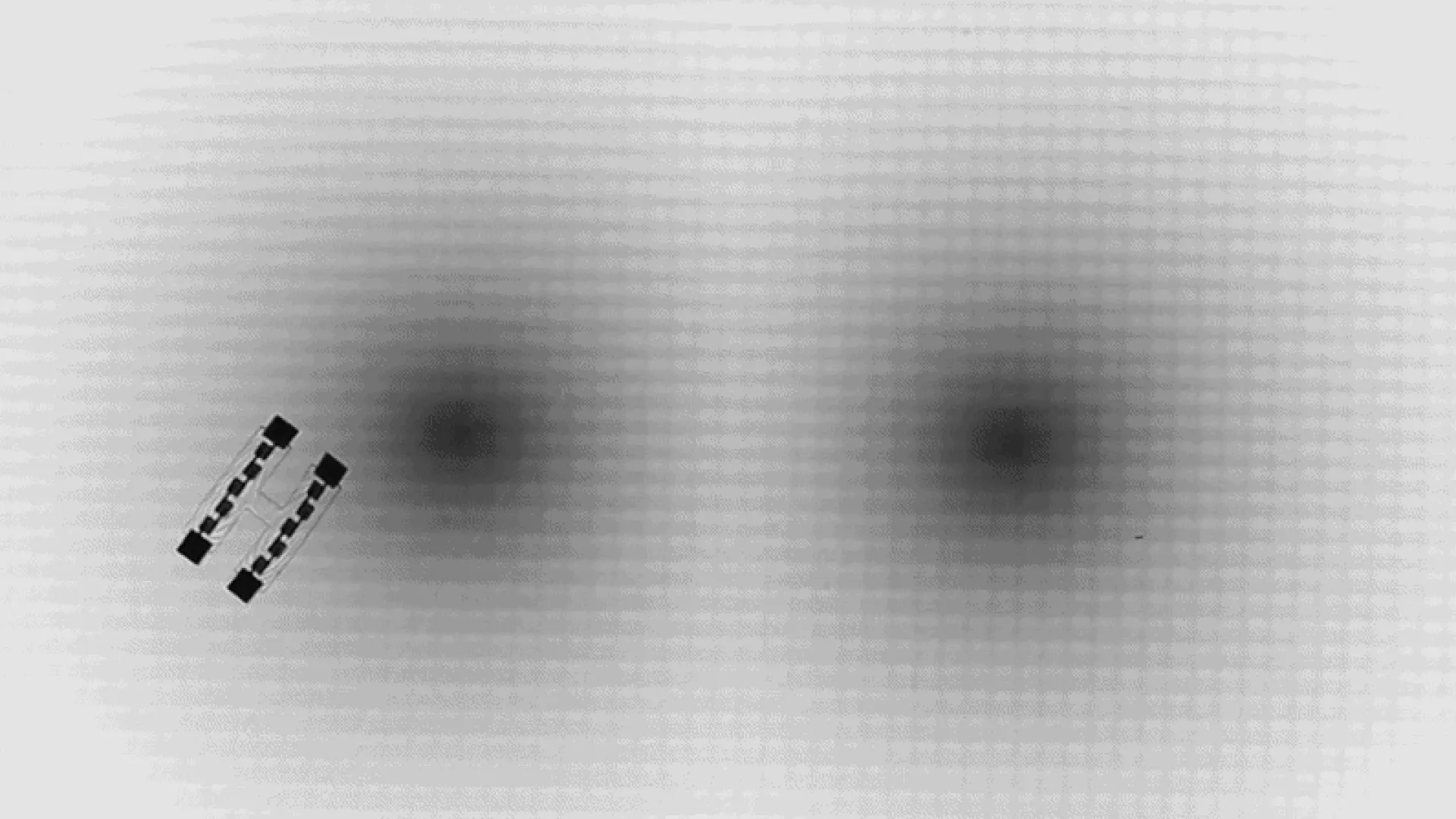
Çalışmada, bir insan saçının genişliğine yakın 100 mikron boyutlarındaki elektrokinetik (EK) yüzücü robotlar, iyonize bir çözeltiye daldırılarak basit bir labirentte gezinmeleri istendi. Robotlar, üzerlerinde küçük güneş pilleri ve elektrotlar taşıyordu. Güneş pilleri ışığa maruz kaldığında, elektrotları çalıştırarak bir elektrik alanı oluşturuyor ve bu alan robotları çözelti içinde iterek hareket etmelerini sağlıyordu.
Asıl zorluk, bu mikroskobik makineleri, labirent duvarlarına takılmadan belirli bir noktaya hassas bir şekilde yönlendirebilmekti. İşte bu noktada görelilik devreye girdi. Einstein'ın genel görelilik teorisine göre, kütlesi olan cisimlerin etrafındaki uzay-zaman bükülür. Işık ve cisimler, bu bükülmüş uzay-zaman içinde 'düz' jeodezikler yani en kısa yolları takip eder. Bunun en güzel örneği kütleçekimsel merceklemedir: Işık evrende düz bir çizgide ilerlese de, devasa bir cismin kütleçekimsel etkisiyle geçerken eğri ve büyümüş gibi görünebilir.
Araştırmanın baş yazarlarından biri, bu durumun EK robotların desenli ışık alanlarındaki davranışının, genel görelilikte ışığın izlediği yollarla birebir aynı olduğunu gösterdiğini belirtti. Bu durumun bir 'yerçekimi analoğu' olarak kullanılabileceğini, çünkü bu eşleşmenin kusursuz olduğunu ekledi. Alternatif olarak, genel görelilik fikirlerinin robotları yönlendirmek için de kullanılabileceğini, tıpkı yerçekiminin cisimleri bir araya çekmesi gibi, robotların da belirli bir noktaya yönlendirilebileceğini vurguladı.
Yapay Uzay-Zaman
Bu etkiyi taklit etmek için ekip, labirenti görelilik denklemleriyle bükülmüş sanal bir uzay olarak modelledi. Labirent içindeki hedefe giden yollar modelde basit düz çizgiler haline geldi. Ardından, bu modeli 2B bir ışık haritasına dönüştürdüler. Koyu alanlar robotları çekiyor, daha parlak alanlar ise itiyordu. Labirentin bitiş noktası, engellerin daha parlak aydınlatıldığı, adeta bir 'yapay kara delik' görevi gören en koyu nokta olarak belirlendi.
Robotlar başlangıçta nerede konumlanırsa konumlansın, EK botlar bu jeodezikleri otomatik olarak takip ederek duvarlardan kaçındı; adeta eğrilmiş uzayda yokuş aşağı kayar gibi ilerlediler. Araştırmacılar bulgularını geçtiğimiz aylarda bir bilimsel dergide yayımladı.
Bu çalışma, görelilik ve teknoloji dünyaları arasında bir köprü kuruyor. Bir yandan, görelilik ve ışık çok iyi anlaşılmış kavramlar; bunlara reaktif kontrol eklemek, robotik için yeni düşünce biçimleri ve yerleşik araçlar sunuyor. Diğer yandan, genel görelilik ve optik soyut kavramlar iken, robotik mekanik ve somuttur; robotun neden belirli bir şekilde davrandığını anlamak oldukça kolaydır. Yeni robot türlerinin optik teorilerine göre nasıl davrandığını göstermenin yanı sıra, bu deneyler araştırmacılara genel görelilik konusunda daha fazla içgörü sağlıyor; özellikle 2 boyutlu uzaylarda 'düz uzay-zamanların' etkisini inceleyerek. Bu, mikroskobik dünyanın büyüleyici bir alan olduğunu ve bu fikirlerin buzdağının yalnızca görünen kısmı olabileceğini düşündürüyor.
Bu labirent çalışması henüz çok erken bir aşama olsa da, pratik uygulamaların önümüzdeki 10 yıl içinde ortaya çıkabileceği belirtiliyor. Kök kanal tedavisi sonrası dişleri kontrol etmek, kanserli hücreleri tespit ettikten sonra tümörleri yok etmek veya mikroçip montajı gibi alanlarda bu tür minik robotların kullanılabileceği potansiyel uygulamalar arasında yer alıyor.