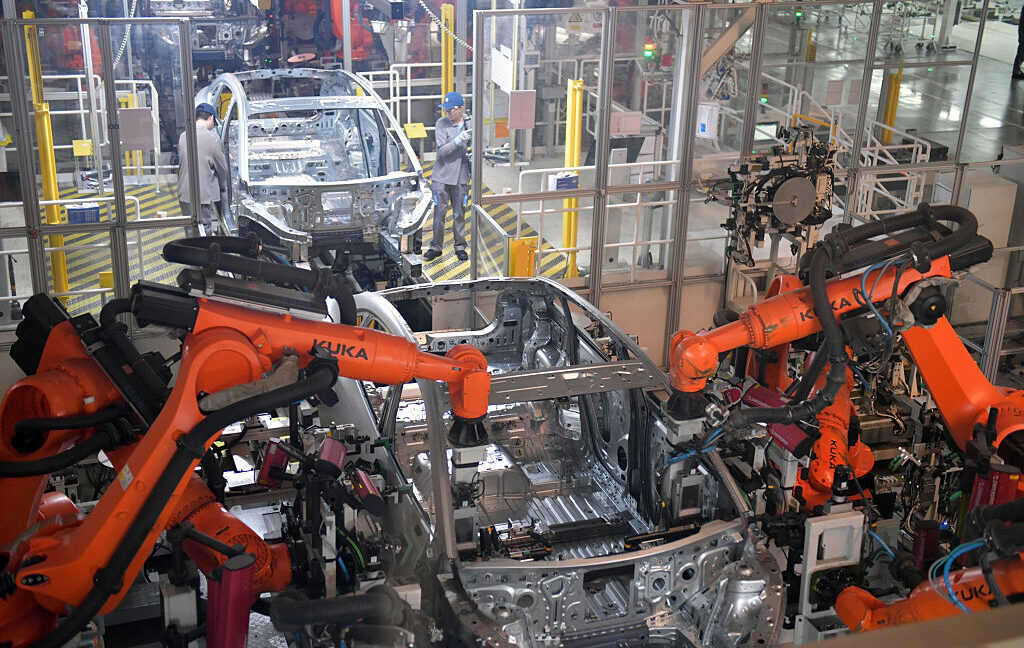
Günlük hayatımızda kullandığımız pek çok ürün, hassas bir senkronizasyonla hareket eden konveyör bantları üzerinde ilerlerken, çok sayıda hareket serbestliğine sahip robot kolları tarafından üretiliyor. Geleneksel olarak bu karmaşık hareketlerin programlanması, yüzlerce hatta binlerce saat sürebilen manuel bir süreç gerektiriyor. Ancak Google'ın DeepMind ekibi, üretim süreçlerini tamamen değiştirebilecek bir yapay zeka sistemi geliştirdi: RoboBallet.
Üretim Robotları İçin Akıllı Planlama
Üretim robotlarının görevlerini verimli bir şekilde yerine getirmesini sağlamak, otomatikleştirması zorlu bir problemdir. Hangi robotun hangi görevi hangi sırayla yapacağını belirleyen görev atama ve planlama, karmaşık bir optimizasyon problemi olarak karşımıza çıkar. Buna ek olarak, robot kollarının birbirleriyle veya çevredeki ekipmanlarla çarpışmasını önleyecek hareket planlaması da büyük önem taşır.
Bu üç zorlu problemi aynı anda çözmek, adeta birleştirilmiş ve katlanmış bir 'gezgin satıcı problemi' gibidir. Matthew Lai, Google DeepMind'da bir araştırma mühendisi olarak, “Bazı araçlar hareket planlamasını otomatikleştirebiliyor, ancak görev atama ve planlama genellikle manuel yapılıyor. Bu üç problemi bir arada çözmek, üzerinde çalıştığımız konuydu” diyor.
Lai ve ekibi, robotların görevlerini yerine getirdiği 'iş hücreleri'nin simülasyonlarını oluşturarak işe başladı. Bu iş hücrelerinde, alüminyum çubuklardan oluşan bir iş parçasını monte eden sekiz adede kadar robot kolu kullanıldı. Her bir robot kolunun, iş parçası üzerindeki belirli bir noktaya doğru açıdan yaklaşarak sabit kalması gerekiyordu. Bu duruş, bir montaj işlemini simüle ediyordu.
Simülasyonları daha da zorlu hale getirmek için ekibin, iş hücrelerine rastgele engeller yerleştirdiğini belirtiyor. Lai, “Her zaman birbirlerine engel olmayan sekiz robot, yakın paketlenmiş bir sistem için makul bir üst sınır olarak düşündük. İş parçası üzerinde 40 görevin yerine getirilmesi de gerçek fabrikalarda gerekenleri temsil ediyordu” diye açıklıyor.
Böylesine karmaşık bir kurulumu, en güçlü pekiştirmeli öğrenme algoritmalarıyla bile ele almak bir kabus olabilirdi. Lai ve meslektaşları, bu durumu grafiklere dönüştürerek bir çözüm buldular.
Karmaşık İlişkilerin Grafiğe Dönüşümü
Lai'nin modelinde grafikler, düğümler (node) ve kenarlar (edge) comprised.
“Her şey veriyi sadeleştirdi ve araştırmacıların sadece en önemli şeye odaklanmasını sağladı: engelleri aşarken görevleri en verimli şekilde tamamlama yollarını bulmak. Rastgele oluşturulmuş iş hücrelerinde birkaç günlük bir eğitimle, RoboBallet adı verilen yeni endüstriyel planlama yapay zekası, daha önce görülmemiş karmaşık ortamlarda saniyeler içinde görünüşte uygulanabilir yörüngeler belirleyebildi.
En önemlisi ise, sistemin ölçeklenebilirliği oldukça iyiydi.
Ölçek Ekonomisi ve Hız Kazanımı
Karmaşık robot yönetimi problemleri gibi konularda geleneksel hesaplama yöntemlerinin uygulanmasındaki sorun, sistemdeki öğe sayısı arttıkça hesaplama zorluğunun üstel olarak büyümesidir. Bir robot için en uygun yörüngeleri hesaplamak nispeten basittir. İki robot için bu daha zordur; sayı sekize ulaştığında problem pratikte çözülemez hale gelir.
RoboBallet ile hesaplama karmaşıklığı da sistemin karmaşıklığıyla birlikte artar, ancak çok daha yavaş bir oranda. (Hesaplamalar, artan görev ve engel sayısıyla doğrusal, robot sayısıyla ise karesel olarak büyüdü.) Ekip tarafından yapılan hesaplamalara göre, bu hesaplamalar sistemin endüstriyel ölçekte kullanılabilmesini mümkün kılacaktır.
Ekip, yapay zekanın ürettiği planların ne kadar iyi olduğunu test etmek istedi. Bunu kontrol etmek için Lai ve meslektaşları, birkaç basitleştirilmiş iş hücresinde en uygun görev atamalarını, planlamaları ve hareketleri hesapladı ve RoboBallet'in sonuçlarıyla karşılaştırdı. Üretimde en önemli metrik olan yürütme süresi açısından, yapay zeka insan mühendislerinin yapabildiğine çok yaklaştı. Onlardan daha iyi değildi; sadece daha hızlı bir cevap sağlıyordu.
Ekip ayrıca, RoboBallet planlarını alüminyum bir iş parçası üzerinde çalışan dört Panda robotunun gerçek fiziksel kurulumunda da test etti ve simülasyonlardaki kadar iyi çalıştılar. Ancak Lai, bunun robotları programlama sürecini hızlandırmaktan daha fazlasını yapabileceğini söylüyor.
Esnek ve Hızlı Tasarım İmkanı
DeepMind ekibine göre RoboBallet, daha iyi iş hücreleri tasarlamamızı da sağlıyor. Lai, “Çok hızlı çalıştığı için, bir tasarımcının neredeyse gerçek zamanlı olarak farklı yerleşimleri, farklı robot yerleşimlerini veya seçimlerini denemesi mümkün olacaktır. Bu şekilde, fabrikalardaki mühendisler, bir hücreye ek bir robot ekleyerek veya farklı tipte bir robot seçerek ne kadar zaman kazanacaklarını tam olarak görebilecekler. RoboBallet'in yapabileceği bir diğer şey de iş hücresini anında yeniden programlayabilmesidir, bu da bir robot arızalandığında diğer robotların onun yerini doldurmasını sağlar.”
Yine de, RoboBallet fabrikalara ulaşmadan önce hala düzeltilmesi gereken birkaç nokta var. Lai, “Yaptığımız birkaç basitleştirme var” diye itiraf ediyor. Bunlardan ilki, engellerin küp şeklinde basitleştirilmesiydi. İş parçasının kendisi bile kübikti. Bu, gerçek fabrikalardaki engelleri ve ekipmanları bir dereceye kadar temsil etse de, daha organik şekillere sahip birçok olası iş parçası var. Lai, “Bunları ağaç grafikleri veya nokta bulutları gibi daha esnek bir yolla temsil etmek daha iyi olurdu” diyor. Ancak bu, RoboBallet’in inanılmaz hızında bir düşüşe neden olabilir.
Bir diğer nokta ise, Lai'nin deneylerindeki robotların aynı tipte olmasıydı, oysa gerçek dünyadaki robot ekipleri sıklıkla heterojendir. Lai, “Bu nedenle, gerçek dünya uygulamaları, uygulamanın türüne özgü ek araştırma ve mühendislik gerektirecektir” diyor. Ancak mevcut RoboBallet'in bu tür uyarlamaları destekleyecek şekilde tasarlandığını da ekliyor; kolayca genişletilebiliyor. Ve bu tamamlandığında, umudu, fabrikaları daha hızlı ve çok daha esnek hale getirmesidir.
Lai, “Sisteme iş hücresi modelleri, iş parçası modelleri ve yapılması gereken görevlerin listesi verilmeli; buna dayanarak RoboBallet eksiksiz bir plan üretebilir” diyor.